
- >
- Modules
- >
- >
- Adjust the Surface
Module: Adjust the Surface ()
This module adjusts the given point set or surface to the sub-voxel accuracy by moving points along the gradient direction and snapping them to the local gradient maxima. The points are moved along a path defined by the gradient vector field. The calculation of the path is done using numerical methods: Euler's or Runge-Kutta. If there are several gradient maxima within the search distance, gradient magnitude and distance from the starting point are used to make a decision.
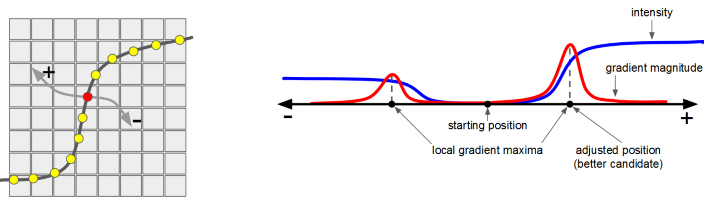
Figure 1: Surface adjustment by integrating in gradient vector field
Input Data [required]
Input point set or surface to be adjusted. This port will accept HxVertexSet or HxSurface.Gradient X [required]
The 3D volume containing X component of the gradient vector field.Gradient Y [required]
The 3D volume containing Y component of the gradient vector field.Gradient Z [required]
The 3D volume containing Z component of the gradient vector field.
Precision
Surface determination precision expressed as a fraction of voxel size. Note this is the precision relative to image. The actual physical measure accuracy may depend on many acquisition factors including voxel size calibration.Adjustment Distance
The distance within which the initial determined surface can be adjusted. This value can be modified depending on image quality, for instance increased in case of strong beam hardening artefact, or reduced for good quality images in particular with thin wall structures.Adjustment Threshold
The initial surface determination is unchanged where the local contrast (gradient) is below this threshold, for instance in areas where image quality can be deteriorated and strong artefact occur. This can reduce overall computation time and potentially improve surface determination to some extent. However you may want improving the image acquisition instead, if you need accurate measurements in such areas.


