fmincon Interior-Point Algorithm with Analytic Hessian
The fmincon interior-point algorithm can
accept a Hessian function as an input. When you supply a Hessian,
you may obtain a faster, more accurate solution to a constrained minimization
problem.
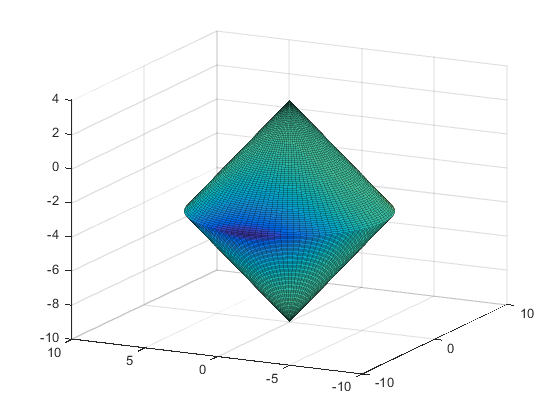
The constraint set for this example is the intersection of the
interior of two cones—one pointing up, and one pointing down.
The constraint function c is a two-component vector,
one component for each cone. Since this is a three-dimensional example,
the gradient of the constraint c is a 3-by-2 matrix.
function [c ceq gradc gradceq] = twocone(x)
% This constraint is two cones, z > -10 + r
% and z < 3 - r
ceq = [];
r = sqrt(x(1)^2 + x(2)^2);
c = [-10+r-x(3);
x(3)-3+r];
if nargout > 2
gradceq = [];
gradc = [x(1)/r,x(1)/r;
x(2)/r,x(2)/r;
-1,1];
endx(1) coordinate becomes negative.
Its gradient is a three-element vector.function [f gradf] = bigtoleft(x)
% This is a simple function that grows rapidly negative
% as x(1) gets negative
%
f=10*x(1)^3+x(1)*x(2)^2+x(3)*(x(1)^2+x(2)^2);
if nargout > 1
gradf=[30*x(1)^2+x(2)^2+2*x(3)*x(1);
2*x(1)*x(2)+2*x(3)*x(2);
(x(1)^2+x(2)^2)];
endx = [-6.5,0,-3.5]:
The Hessian of the Lagrangian is given by the equation:
The following function computes the Hessian at
a point x with Lagrange multiplier structure lambda:
function h = hessinterior(x,lambda)
h = [60*x(1)+2*x(3),2*x(2),2*x(1);
2*x(2),2*(x(1)+x(3)),2*x(2);
2*x(1),2*x(2),0];% Hessian of f
r = sqrt(x(1)^2+x(2)^2);% radius
rinv3 = 1/r^3;
hessc = [(x(2))^2*rinv3,-x(1)*x(2)*rinv3,0;
-x(1)*x(2)*rinv3,x(1)^2*rinv3,0;
0,0,0];% Hessian of both c(1) and c(2)
h = h + lambda.ineqnonlin(1)*hessc + lambda.ineqnonlin(2)*hessc;Run this problem using the interior-point algorithm in fmincon.
To do this using the Optimization app:
Set the problem as in the following figure.
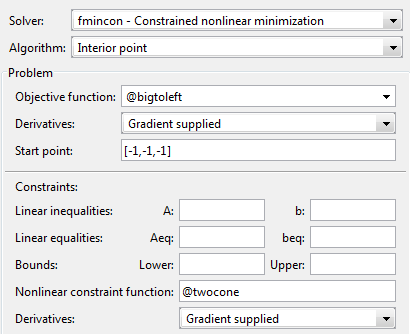
For iterative output, scroll to the bottom of the Options pane and select Level of display,
iterative.
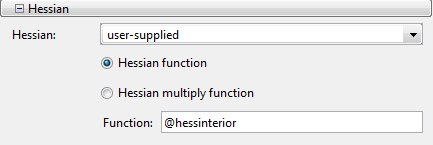
In the Options pane, give the analytic Hessian function handle.
Under Run solver and view results, click Start.
To perform the minimization at the command line:
Set
optionsas follows:options = optimoptions(@fmincon,'Algorithm','interior-point',... 'Display','off','GradObj','on','GradConstr','on',... 'Hessian','user-supplied','HessFcn',@hessinterior);Run
fminconwith starting point [–1,–1,–1], using theoptionsstructure:[x fval mflag output] = fmincon(@bigtoleft,[-1,-1,-1],... [],[],[],[],[],[],@twocone,options)
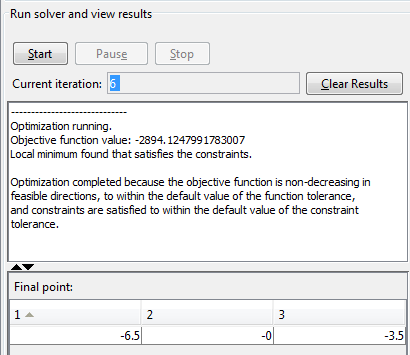
The output is:
x =
-6.5000 -0.0000 -3.5000
fval =
-2.8941e+03
mflag =
1
output =
iterations: 6
funcCount: 7
constrviolation: 0
stepsize: 3.0479e-05
algorithm: 'interior-point'
firstorderopt: 5.9812e-05
cgiterations: 3
message: 'Local minimum found that satisfies the constraints.…'If you do not use a Hessian function, fmincon takes
9 iterations to converge, instead of 6:
options = optimoptions(@fmincon,'Algorithm','interior-point',...
'Display','off','GradObj','on','GradConstr','on');
[x fval mflag output]=fmincon(@bigtoleft,[-1,-1,-1],...
[],[],[],[],[],[],@twocone,options)
x =
-6.5000 -0.0000 -3.5000
fval =
-2.8941e+03
mflag =
1
output =
iterations: 9
funcCount: 13
constrviolation: 2.9391e-08
stepsize: 6.4842e-04
algorithm: 'interior-point'
firstorderopt: 1.4235e-04
cgiterations: 0
message: 'Local minimum found that satisfies the constraints.…'