- >
- Modules
- >
- >
- Local Orientation / Orientation Map
Module: Local Orientation / Orientation Map ()
Orientation Matching is one of the configurations of the module Local Orientation. For other configurations, see the port Type.
For an introduction, see section Analysis.
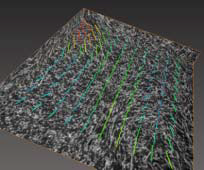
This module computes local orientation information in the 3D image. This is done using principal component analysis techniques. In particular, it estimates the main local orientation.
The image is first divided into blocks of a user-defined size which must be of the power of 2. The blocks may overlap. Then the Fourier transform is computed on each block to extract the amplitude.
Main orientation :
The inertia matrix
is computed on each Fourier transformed blocks. The matrix is symmetric, thus, the Jacobi iterative method can be used to extract the eigenvalues and the eigenvectors.
The main fiber orientation is given by the eigenvector associated with the lowest eigenvalue. The confidence of the estimated main orientation is calculated as follows:
with being the first eigenvalue (i.e. the maximum of eigenvalues),
being the second and
the third (the minimum of eigenvalues).
With this formula, the confidence is between 0.33 and 1, then, a normalization adapts the range between 0 and 1.
This module doesn't compute local orientation in a block in two cases:
- density of fibers is lower than 5
- center of inertia is too far of the center of the block (i.e. the block is on a border of the object).
See also: Area 3D, Euler Number 3D, Fractal Dimension, Moments of Inertia 3D, Volume Fraction, Curvature Integrals.
Input Image [required]
The image to be analyzed. Supported types include: grayscale/color image (Uniform Scalar Field/Uniform Color Field)
Type
Type port selects the configuration of this module. The available configurations are:Interpretation
This port specifies whether the input will be interpreted as a 3D volume or a stack of 2D images for processing. The port is grayed out if an alternative interpretation is not available.Block Size
Defines the size of a block (must be power of 2, and128).
Block Overlap
Enables/Disables overlapping blocks.Min Threshold
Defines the minimum threshold value applied to the input grayscale image.Max Threshold
Defines the maximum threshold value applied to the input grayscale image.