Minimization with Gradient and Hessian Sparsity Pattern
This example shows how to solve a nonlinear minimization problem with tridiagonal Hessian matrix approximated by sparse finite differences instead of explicit computation.
The problem is to find x to minimize
where n = 1000.
To use the trust-region method in fminunc, you must compute
the gradient in fun; it is not optional
as in the quasi-newton method.
The brownfg file computes the objective function
and gradient.
Step 1: Write a file brownfg.m that computes the objective function and the gradient of the objective.
This function file ships with your software.
function [f,g] = brownfg(x)
% BROWNFG Nonlinear minimization test problem
%
% Evaluate the function
n=length(x); y=zeros(n,1);
i=1:(n-1);
y(i)=(x(i).^2).^(x(i+1).^2+1) + ...
(x(i+1).^2).^(x(i).^2+1);
f=sum(y);
% Evaluate the gradient if nargout > 1
if nargout > 1
i=1:(n-1); g = zeros(n,1);
g(i) = 2*(x(i+1).^2+1).*x(i).* ...
((x(i).^2).^(x(i+1).^2))+ ...
2*x(i).*((x(i+1).^2).^(x(i).^2+1)).* ...
log(x(i+1).^2);
g(i+1) = g(i+1) + ...
2*x(i+1).*((x(i).^2).^(x(i+1).^2+1)).* ...
log(x(i).^2) + ...
2*(x(i).^2+1).*x(i+1).* ...
((x(i+1).^2).^(x(i).^2));
endTo allow efficient computation of the sparse finite-difference
approximation of the Hessian matrix H(x),
the sparsity structure of H must be predetermined.
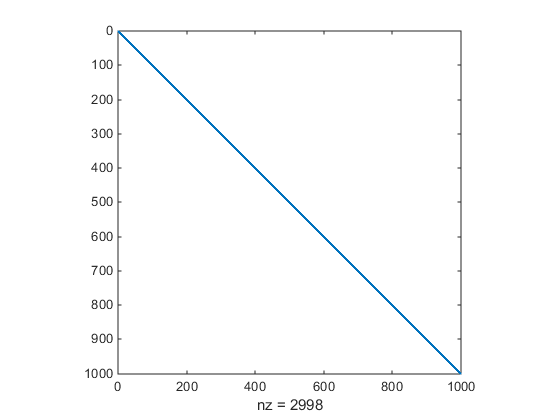
In this case assume this structure, Hstr, a sparse
matrix, is available in file brownhstr.mat. Using
the spy command you can see
that Hstr is indeed sparse (only 2998 nonzeros).
Use optimoptions to set the HessPattern option
to Hstr. When a problem as large as this has obvious
sparsity structure, not setting the HessPattern option
requires a huge amount of unnecessary memory and computation because fminunc attempts to use finite differencing
on a full Hessian matrix of one million nonzero entries.
You must also set the GradObj option to 'on' using optimoptions, since the gradient is computed
in brownfg.m. Then execute fminunc as
shown in Step 2.
Step 2: Call a nonlinear minimization routine with a starting point xstart.
fun = @brownfg; load brownhstr % Get Hstr, structure of the Hessian spy(Hstr) % View the sparsity structure of Hstr
n = 1000;
xstart = -ones(n,1);
xstart(2:2:n,1) = 1;
options = optimoptions(@fminunc,'Algorithm','trust-region',...
'GradObj','on','HessPattern',Hstr);
[x,fval,exitflag,output] = fminunc(fun,xstart,options); This 1000-variable problem is solved in seven iterations and
seven conjugate gradient iterations with a positive exitflag indicating
convergence. The final function value and measure of optimality at
the solution x are both close to zero (for fminunc, the first-order optimality is
the infinity norm of the gradient of the function, which is zero at
a local minimum):
exitflag,fval,output
exitflag =
1
fval =
7.4738e-17
output =
iterations: 7
funcCount: 8
stepsize: 0.0046
cgiterations: 7
firstorderopt: 7.9822e-10
algorithm: 'trust-region'
message: 'Local minimum found.…'
constrviolation: []