Minimization with Bound Constraints and Banded Preconditioner
The goal in this problem is to minimize the nonlinear function
such that -10.0 ≤ xi ≤ 10.0, where n is 800 (n should be a multiple of 4), p = 7/3, and x0 = xn + 1 = 0.
Step 1: Write a file tbroyfg.m that computes the objective function and the gradient of the objective
The tbroyfg.m file computes the function
value and gradient. This file is long and is not included here. You
can see the code for this function using the command
type tbroyfg
The sparsity pattern of the Hessian matrix has been predetermined
and stored in the file tbroyhstr.mat. The sparsity
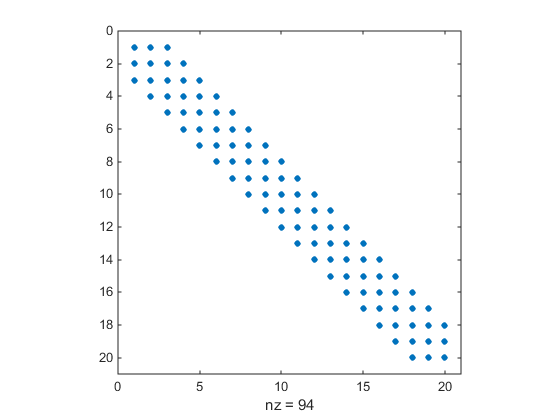
structure for the Hessian of this problem is banded, as you can see
in the following spy plot.
load tbroyhstr spy(Hstr)

In this plot, the center stripe is itself a five-banded matrix. The following plot shows the matrix more clearly:
spy(Hstr(1:20,1:20))
Use optimoptions to set
the HessPattern parameter to Hstr.
When a problem as large as this has obvious sparsity structure, not
setting the HessPattern parameter requires a huge
amount of unnecessary memory and computation. This is because fmincon attempts to use finite differencing
on a full Hessian matrix of 640,000 nonzero entries.
You must also set the GradObj parameter to 'on' using optimoptions, since the gradient is computed
in tbroyfg.m. Then execute fmincon as
shown in Step 2.
Step 2: Call a nonlinear minimization routine with a starting point xstart.
fun = @tbroyfg;
load tbroyhstr % Get Hstr, structure of the Hessian
n = 800;
xstart = -ones(n,1); xstart(2:2:n) = 1;
lb = -10*ones(n,1); ub = -lb;
options = optimoptions('fmincon','GradObj','on','HessPattern',Hstr,...
'Algorithm','trust-region-reflective');
[x,fval,exitflag,output] = ...
fmincon(fun,xstart,[],[],[],[],lb,ub,[],options);After seven iterations, the exitflag, fval,
and output values are
exitflag =
3
fval =
270.4790
output =
iterations: 7
funcCount: 8
stepsize: 8.2073e-04
cgiterations: 18
firstorderopt: 0.0163
algorithm: 'trust-region-reflective'
message: 'Local minimum possible.…'
constrviolation: 0For bound constrained problems, the first-order optimality is
the infinity norm of v.*g, where v is
defined as in Box Constraints, and g is
the gradient.
Because of the five-banded center stripe, you can improve the
solution by using a five-banded preconditioner instead of the default
diagonal preconditioner. Using the optimoptions function,
reset the PrecondBandWidth parameter to 2 and
solve the problem again. (The bandwidth is the number of upper (or
lower) diagonals, not counting the main diagonal.)
fun = @tbroyfg;
load tbroyhstr % Get Hstr, structure of the Hessian
n = 800;
xstart = -ones(n,1); xstart(2:2:n,1) = 1;
lb = -10*ones(n,1); ub = -lb;
options = optimoptions('fmincon','GradObj','on','HessPattern',Hstr, ...
'Algorithm','trust-region-reflective','PrecondBandWidth',2);
[x,fval,exitflag,output] = ...
fmincon(fun,xstart,[],[],[],[],lb,ub,[],options); The number of iterations actually goes up by two; however the
total number of CG iterations drops from 18 to 15. The first-order
optimality measure is reduced by a factor of 1e-3:
exitflag =
3
fval =
270.4790
output =
iterations: 9
funcCount: 10
stepsize: 2.4512e-05
cgiterations: 15
firstorderopt: 7.5340e-05
algorithm: 'trust-region-reflective'
message: 'Local minimum possible.…'
constrviolation: 0